�}Ŀ�б�(�����𰸺ͽ���)

| ��(sh��)�(y��n)��̖ | ����F1/N | ������L1/cm | ����F2/N | ������L2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |

| ��(sh��)�(y��n)��̖ | ����F1/N | ������L1/cm | ����F2/N | ������L2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |
| ��(sh��)�(y��n)��̖ | ����F1/N | ������L1/cm | ����F2/N | ������L2/cm |
| 1 | 2 | 20 | 1 | 10 |
| 2 | 1 | 8 | 2 | 4 |


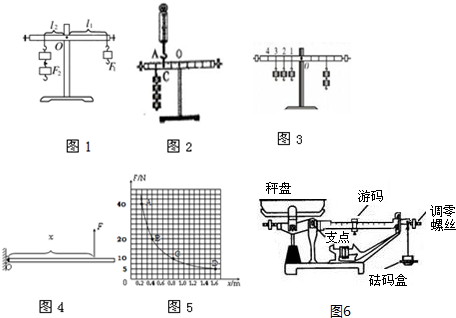
 С����С�t�ÈD����ʾ�ĸܗUһ��̽���ܗU��ƽ��l����
С����С�t�ÈD����ʾ�ĸܗUһ��̽���ܗU��ƽ��l����| ����/N | ����/N | ������/cm | ������/cm |
| 4 | 2 | 3 | 6 |

�ٶ����� - ����(x��)���б� - ԇ�}�б�
����ʡ��(li��n)�W(w��ng)�`���Ͳ�����Ϣ�e��(b��o)ƽ�_ | �W(w��ng)���к���Ϣ�e��(b��o)���^(q��) | ����p�_�e��(b��o)���^(q��) | ��vʷ̓�o���x�к���Ϣ�e��(b��o)���^(q��) | �����֙�(qu��n)�e��(b��o)���^(q��)
�`���Ͳ�����Ϣ�e��(b��o)�Ԓ��027-86699610 �e��(b��o)�]�䣺58377363@163.com